2020年に、米スタンフォード大学で生まれた4歩足歩行ロボット「Stanford Pupper」。このプロジェクトに携わっていたMangDangが、ミニサイズのPupperとしてリリースしたのが「Mini Pupper(愛称「ミニぷぱ」)」です。
「1家に1台365日ロボットがいる日常を楽しんでほしい」という想いから生まれたミニぷぱは、2021年9月にkickstarterで先行発売され、12月には日本でもMakuakeで先行販売を開始。現在、世界中で約4000台が家族として迎え入れられているとのことです。
そんなミニぷぱの新モデル「ミニぷぱ 2」がMakuakeで先行販売を開始しました。今回は、レビュー用にミニぷぱ 2を送っていただいたので、「一体何ができるのか?」という点も含めて詳しく紹介します。
組み立てはねじ止め程度の簡単さ
ミニぷぱ 2には、完成版と自分で組み立てるDIY版の2種類があります。完成版は文字通りに完成品のため、届いたらすぐに使い始められます。一方、DIY版はパーツがバラバラの状態で届くので、自分で組み立てる必要があります。
とはいえ、組み立てると言っても、はんだ付けやソフトの書き込みなど作業は不要。コネクタを挿したりねじ止めしたりする程度なので、マニュアルを見ながら作業すれば、30分もあれば組み立てられます。
ミニぷぱの楽しみ方の1つとして、自分好みにカスタマイズするという要素があります。構造を確認するという意味でも、個人的にはDIY版がおすすめです。ただ、細かい作業は苦手で、「とにかくロボットを動かしてみたい」という人は、完成版を選んでももちろんOKです。
今回はDIY版を送ってもらったので、まずは組み立てます。

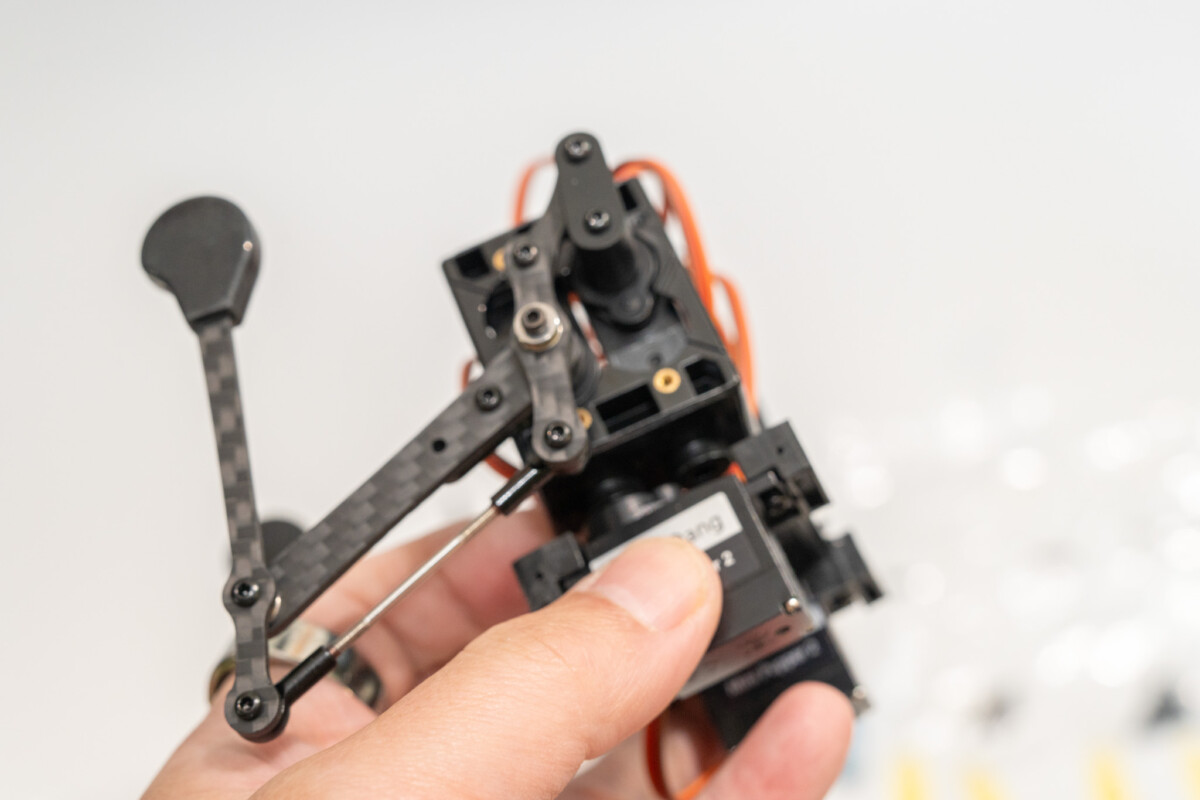
一番面倒そうなサーボモータ周りは完成した状態になっています。
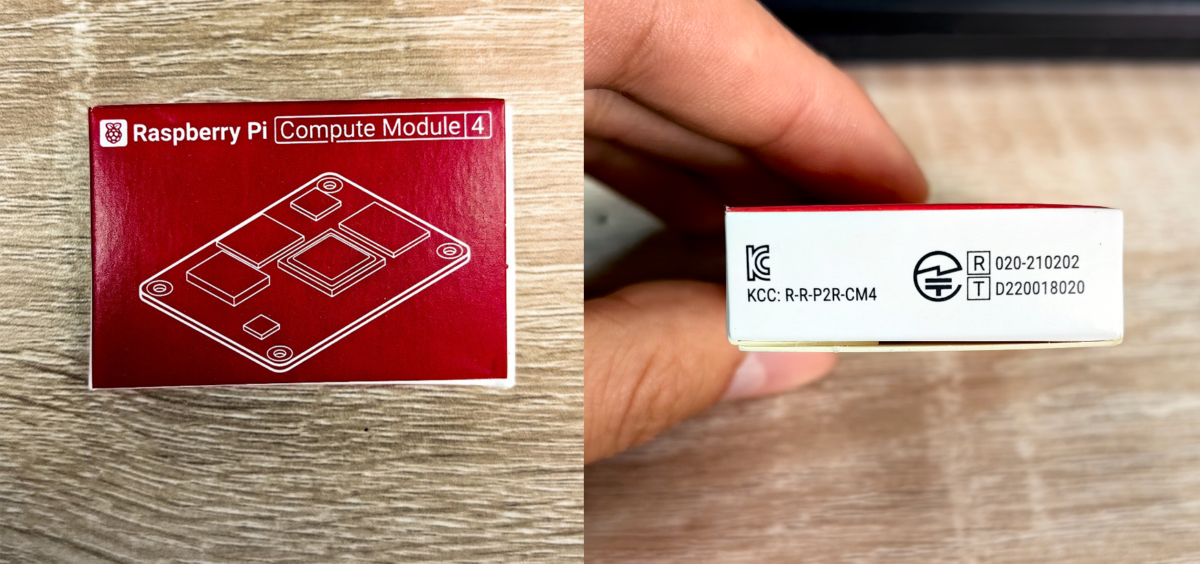
心臓部はRaspberry Pi Compute Module 4(CM4)。無線LANとBluetoothが利用できます。
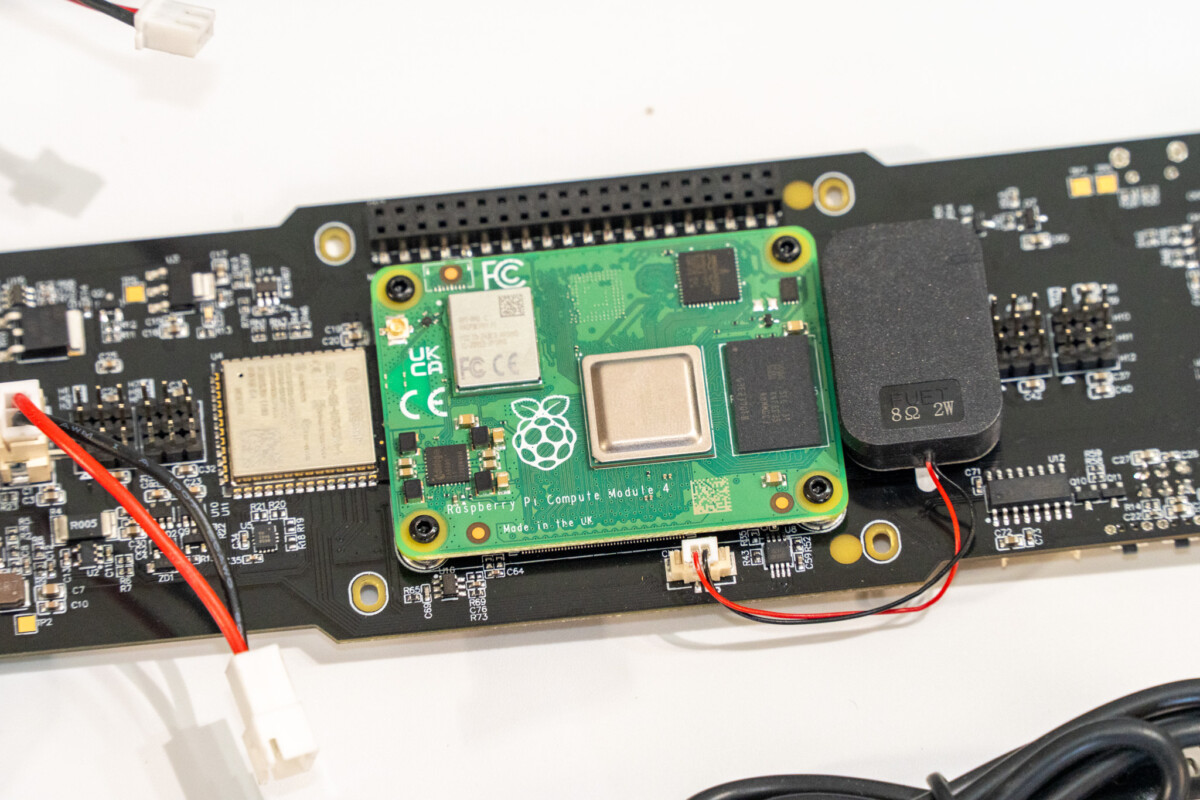
なお、Raspberry Pi Compute Module 4自体に技適のマークは入っていませんが、パッケージに技適のマークが入っているとのことです。
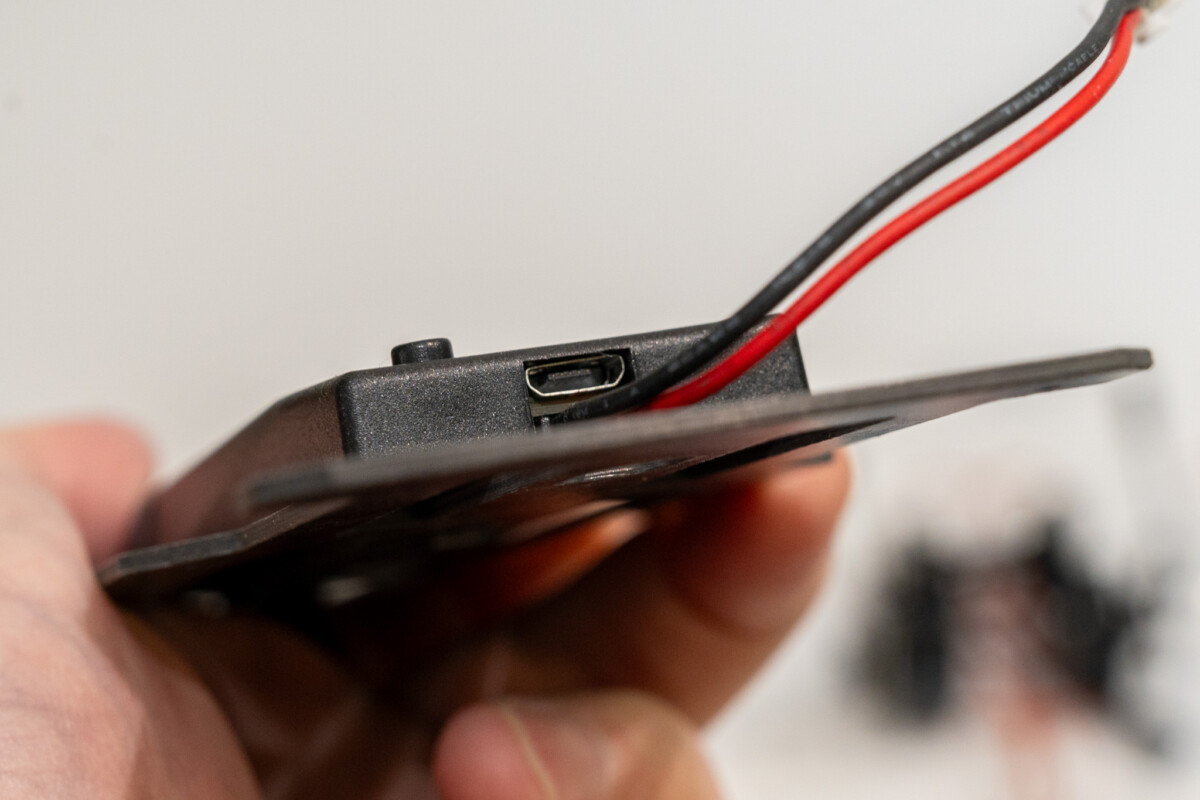
電源のバッテリーはmicroUSB充電。ここはUSB-Cにして欲しかった……。
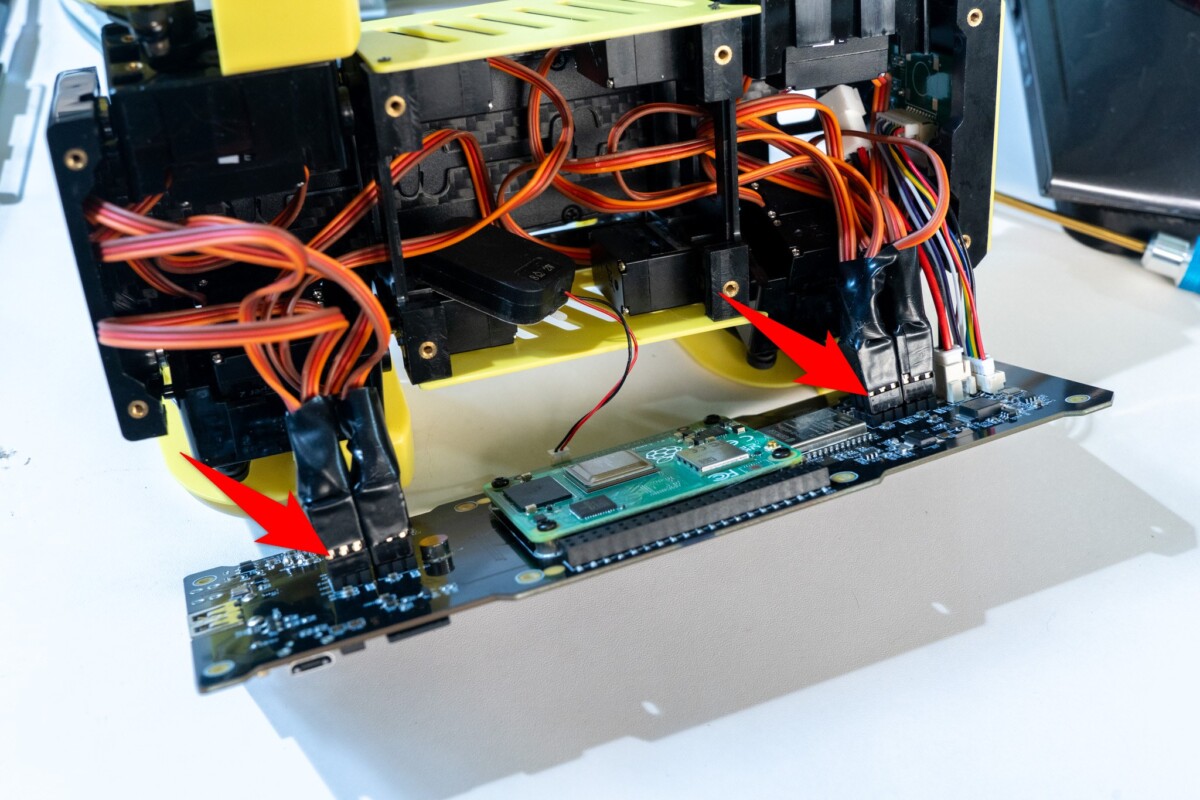
マニュアルやサイトの情報を見ながら作業すれば、組み立て自体は特に難しくはないのですが、唯一迷ったのがサーボモータのコネクタ配置です。どこにどのコネクタを挿せばいいか分かりにくく、マニュアルの図も若干わかりづらい部分がありました。

ケーブルが左前のサーボ、右後ろのサーボとまとまっているわけでないのが余計にわかりづらいのですが、少なくともコネクタの向きはピンが見えるのが左側になるようにすると良いようです(それで動いています)。この部分以外は、特に問題はありませんでした。
初期設定はスマホを使うのが簡単
組み立て後は、電源投入と初期設定を行います。
まず、最初にスマートフォンのテザリング機能などを使い、「SSID:Mangdang」「パスワード:mangdang」のアクセスポイントを用意します。
次に、ミニぷぱ 2の本体背面の電源ボタンを3秒長押しして、電源を入れます。
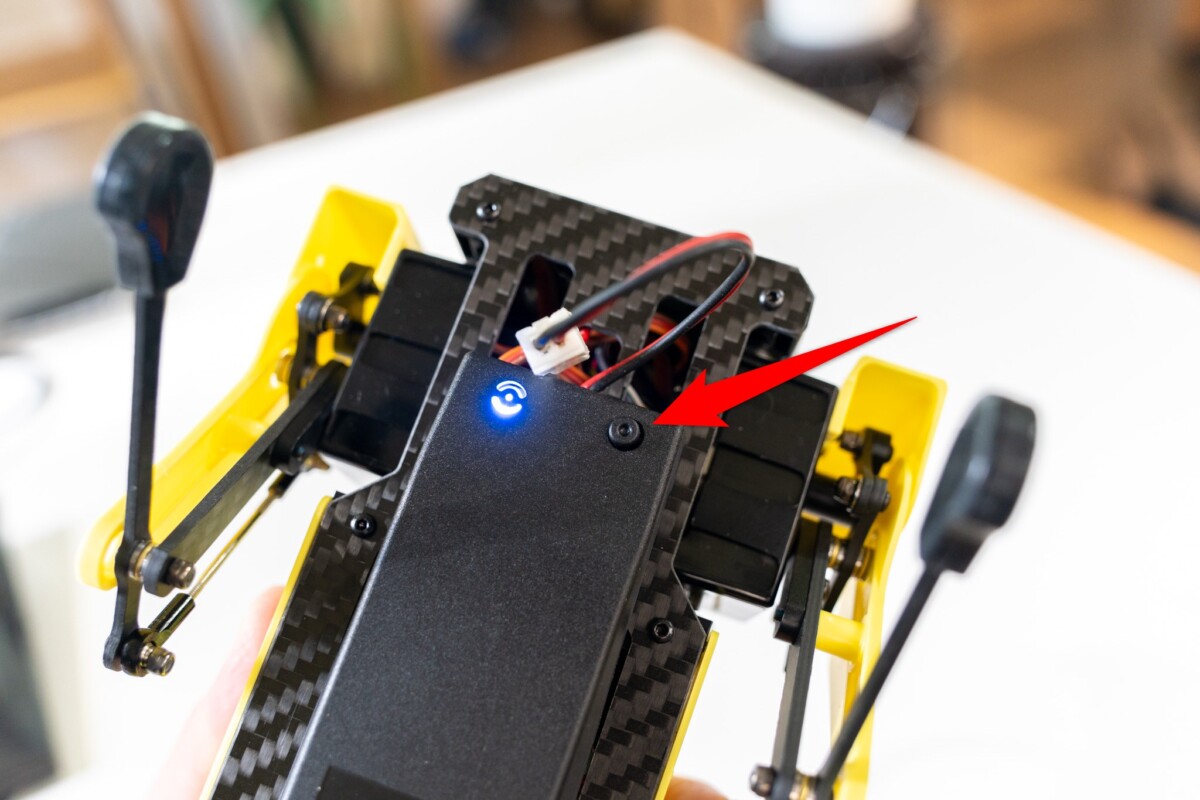
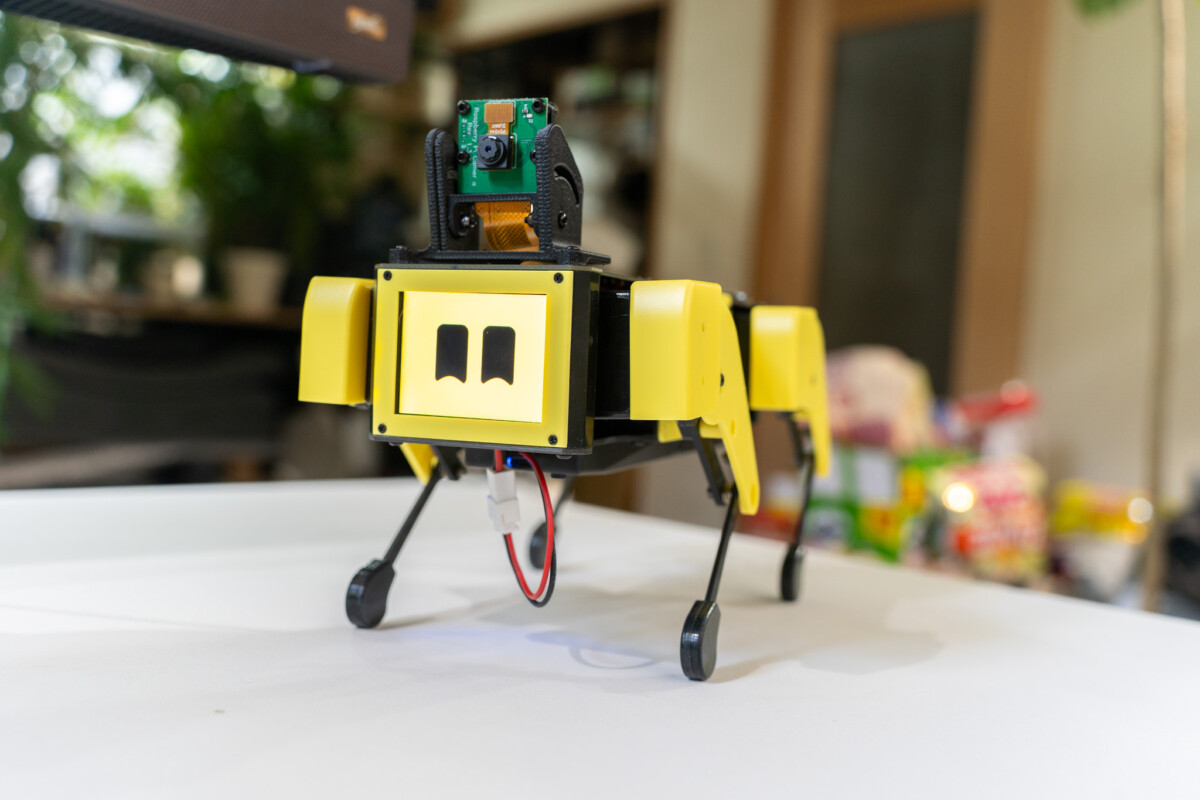
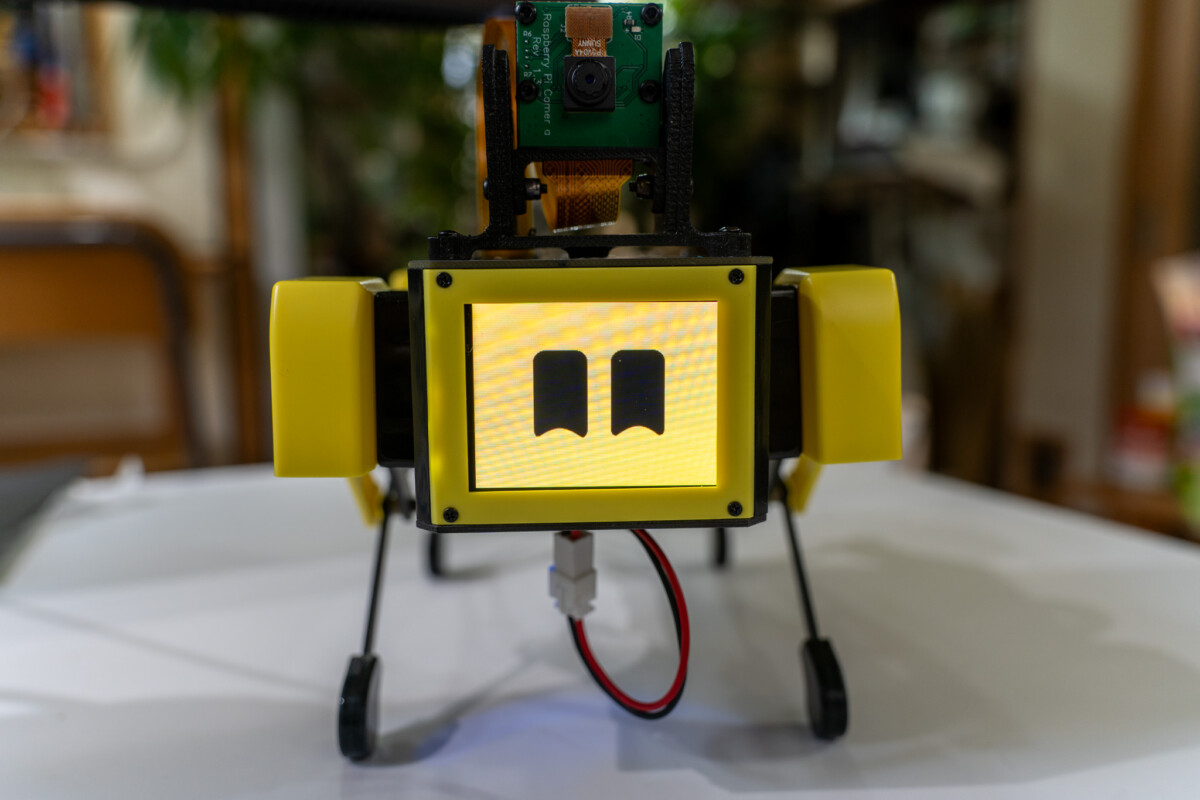
約30秒後、「にゃーん」という猫っぽい起動音(犬なのに猫とは?)とともに、ディスプレイにIPアドレスが表示されます。

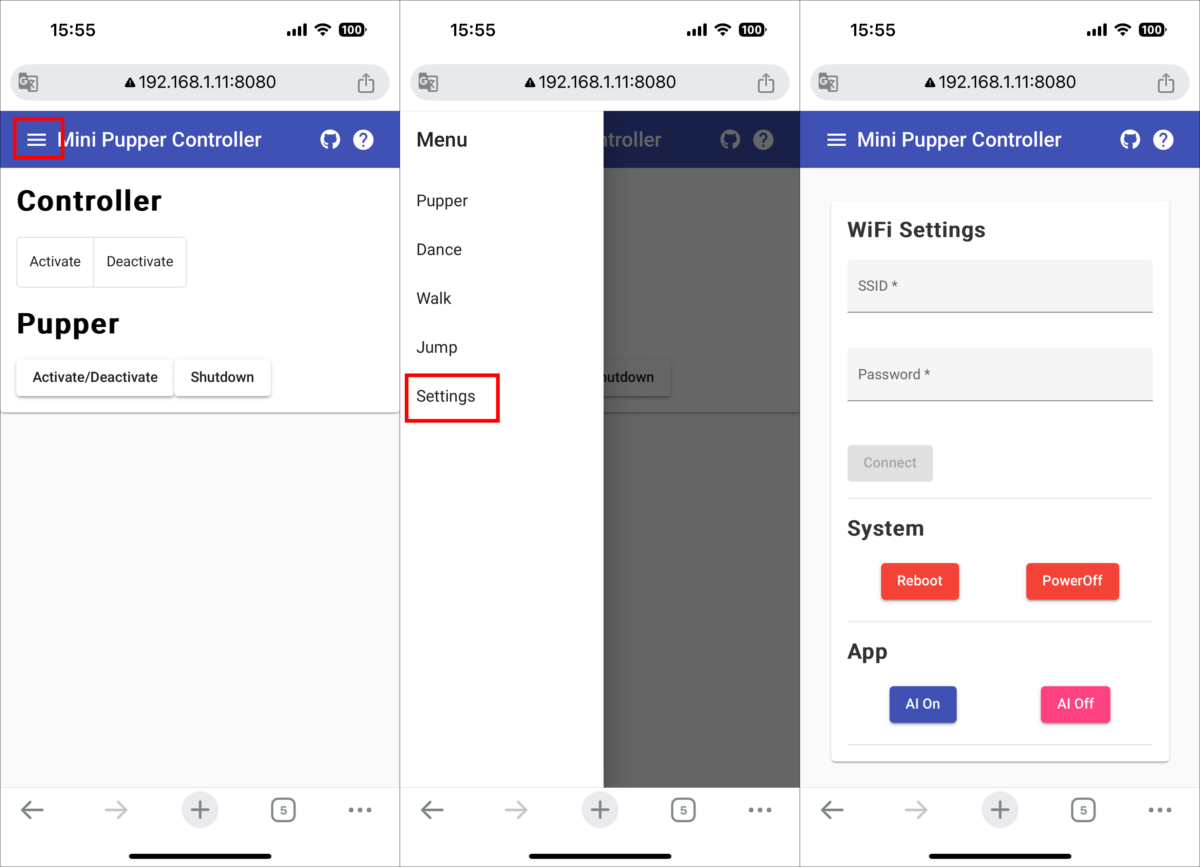
そうしたら、テザリング先(SSID:Mangdang)に接続したPCやスマートフォンからブラウザで「192.168.1.11(ディスプレイに表示されたIPアドレス):8080」にアクセスします。
すると「Mini Pupper Controller」という画面が表示されるので、左上のメニューから「Settings」を選びます。WiFi Settingで自宅のWiFiを設定すれば、いちいちテザリングをする必要はなくなります。
なお、テザリングやスマホを使わずに、ミニぷぱ 2本体にキーボードとディスプレイを接続し、直接設定を書き換えるということもできます。わかる人はこちらの方が簡単かもしれません。
また、スマホを使った場合の最初の画面で「Activate/Deactivate」ボタンをタップすると、ディスプレイに顔が表示されます。
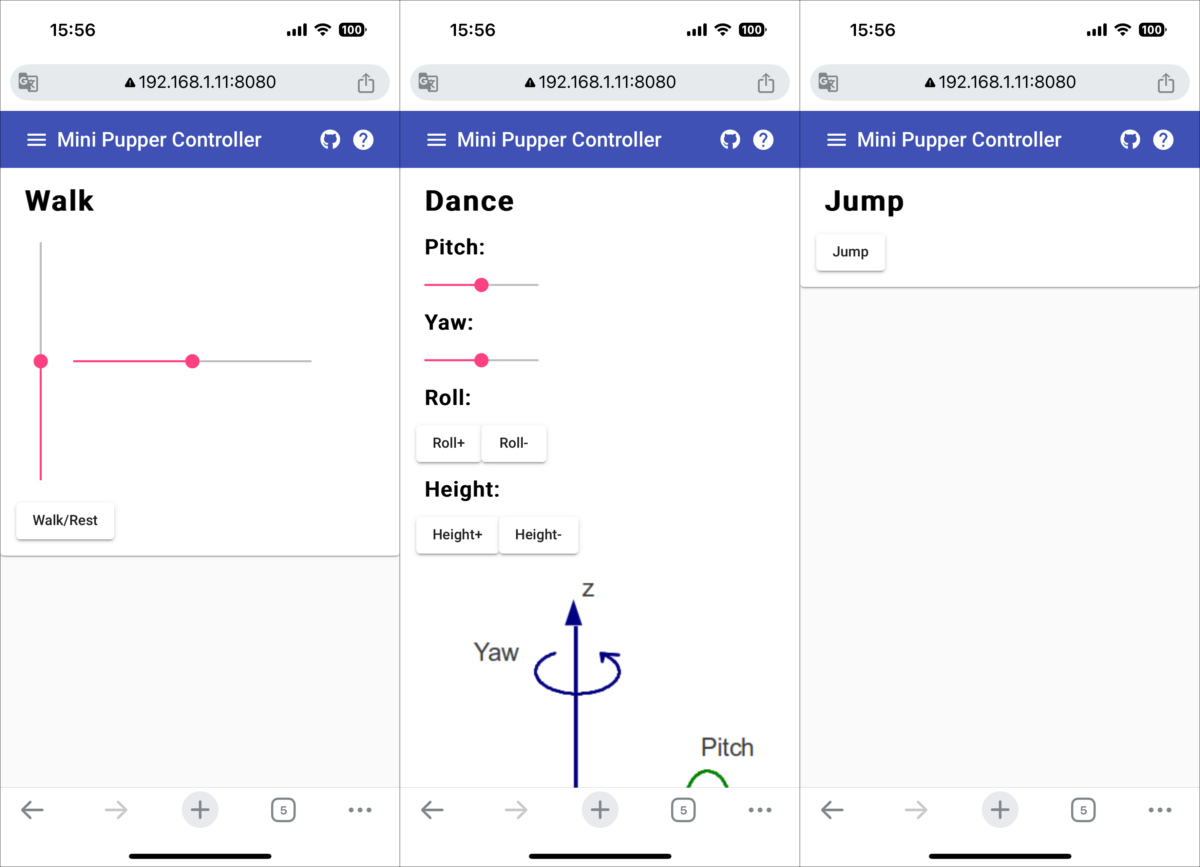
この状態で、スマートフォンをコントローラーとして、歩かせたり躍らせたり、ジャンプ(というか屈伸運動)させたりといったことも行えます。
PS4コントローラーから操作も可能
ラジコン操作としては、スマホからではなく、PS4のコントローラーから行うことも可能です。コントローラーで操作するだけであれば、先のWiFi設定は不要です。
ただし、PS4コントローラーはペアリングできましたが、Xboxコントローラー(Vader 4 Pro)はペアリングすることができませんでした。公式にサポートしているのはPS4コントローラーのみです。Raspberry Piですし、何か弄れば使えるようになるのかもしれません。

操作方法は下記の動画が参考になります。というか、そのままです。
ChatGPT経由でコミュニケーションが可能
WiFi接続している場合、AI機能をONにするとChatGPTを使ったAI機能が利用可能になり、音声である程度の操作が可能になります。
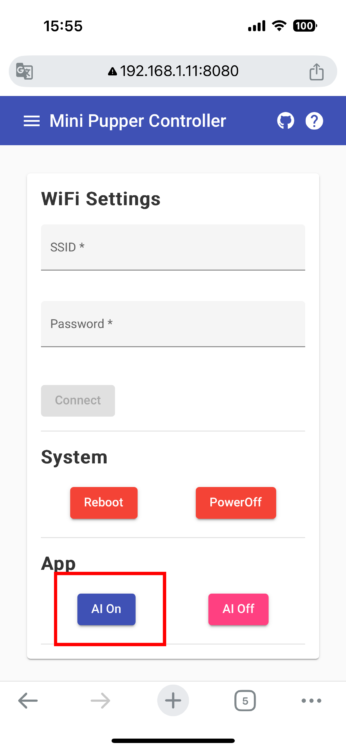
「AI On」をタップすると、15秒くらいしてからディスプレイに「Hello, World」と表示されます。「日本語でお願いします」と声をかけると、以後のやり取りは日本語で行えます。

これで何ができるかですか、普通に日常会話のコミュニケーションができるほか、「踊り」というキーワードでダンスをしてくれたりします。
また、同梱されるカメラモジュールを搭載すれば、じゃんけんで遊ぶことも可能。「じゃんけん」といってカメラに手を差し出すと、ミニぷぱ 2もディスプレイに手を表示して、勝ち負けを判断します。
このほか、「写真」で写真を撮影し、写っているものを認識して説明してくれます。
カスタマイズが面白そう
ミニぷぱ 2は、ROS2(Robot Operating System 2)というロボットアプリケーション開発のためのミドルウェアで動いています。プログラムができる人なら、動作や挙動をカスタマイズしたり自動化したりと、より高度な開発が可能です。
私もドキュメントを参考にROS2の環境を整えてみましたが、その先に進むにはもう少し勉強が必要そうです。
ちなみに、ドキュメントではLinuxのUbuntu 22.04とROS2 Humbleを使っていますが、Windows 11のWSL2環境でも問題ありませんでした。ただし、WSL2をそのままインストールすると、Ubuntu 24.04になってしまいます。このバージョンはROS2 Humbleが対応しておらず、「wsl –install -d Ubuntu-22.04」で22.04をインストールする必要がありました。

プログラムは難しいという人でも、外装をカスタマイズしたり、顔アニメーションを変更したりといった楽しみ方も可能です。たとえば、下の動画はミニぷぱのものですが、外装がカスタマイズされています。
こうした改造やアレンジを続けるうちに、「もっと●●な動きをさせたい!」といった要望が出てきて、自然とプログラミングに触れたくなるかもしれません。
Makuakeでは、完成版が超早割で最大45%オフの6万4900円から(一般販売価格は11万8027円)。DIY版は40%オフの6万5900円から(一般販売価格は10万9116円)で、早ければ5月下旬に出荷の予定となっています。

