
現在Makuakeでプロジェクト実施中のモジュール組み立て式ロボット「ClicBot」を、レビュー用に貸して頂きました。まだプロトタイプとのことで、Makuakeで出荷されるものとは微妙に異なるようですが、それを差し引いてもなかなか面白いロボットです。
ClicBotは、付属のパーツの種類によりスターターキットからメーカーキットまで分けられていますが、スターターキットの中身としては下記のような感じです。

ブレーンユニットはClicBotの心臓部。これがないと何も始まりません。ディスプレイ部はタッチパネルになっており、簡単な設定はアプリを使わなくてもここから行えます。

背面には電源ボタンと充電用のUSB-Cポートもあります。なお、電源ボタンは蓋をした状態でも操作可能。

続いて、何を組立てるにしても、もっとも数を使うジョイントパーツ。サーボモーターが入っており、中央のスリットの部分から回転します。

スケルトンは可動部がない延長パーツのようなもの。

スマホを取り付けるためのホルダーもあります。ただし、スマホを挟むクリップは別途必要。

そしてホイールパーツ。スターターキットに付属のものは2個だけなので、四輪車は作れません。

スタータキットにはもう1つ、マウントというパーツも入っています。これは裏が粘着シートになっており、机の上に固定できるというもの。

スターターキットに含まれるのは以上ですが、それより上のスタンダードキットやフルキット、メーカーキットにはさらに多くのパーツが含まれています。
足圧センサーなどは4足方向ロボットを作るのには必須でしょう

ClicBotの楽しみ方
そんなClicBotですが、基本的な楽しみ方としては、専用アプリに用意されている「遊び場」で、登録されている通りに組立て、ラジコンのように操作する方法と、「実験室」で自分で1からロボットの構成と動作を考える方法の2つがあります。

ちなみに専用アプリはiOS、Android両対応とのことですが、執筆時点(6月6日)次点ではAndroid版のアプリがGoogle Playからダウンロード出来ませんでした。ただ、もともとクラウドファンディングを実施していたKickstarterのアップデート情報を見ると、リリースされているのは間違いなく、新バージョンのアプリが近々リリース予定とのこと。Makuake分出荷時には、問題なく利用出来るものと思います。
用意されたロボットを組立てる遊び場
まず遊び場ですが、登録されているいくつかのロボットの中から1つを選びます。ただし、スターターキットを使って組立てられるのは「リトルテール」1つだけでした。今後、種類の拡充を期待したいところです。

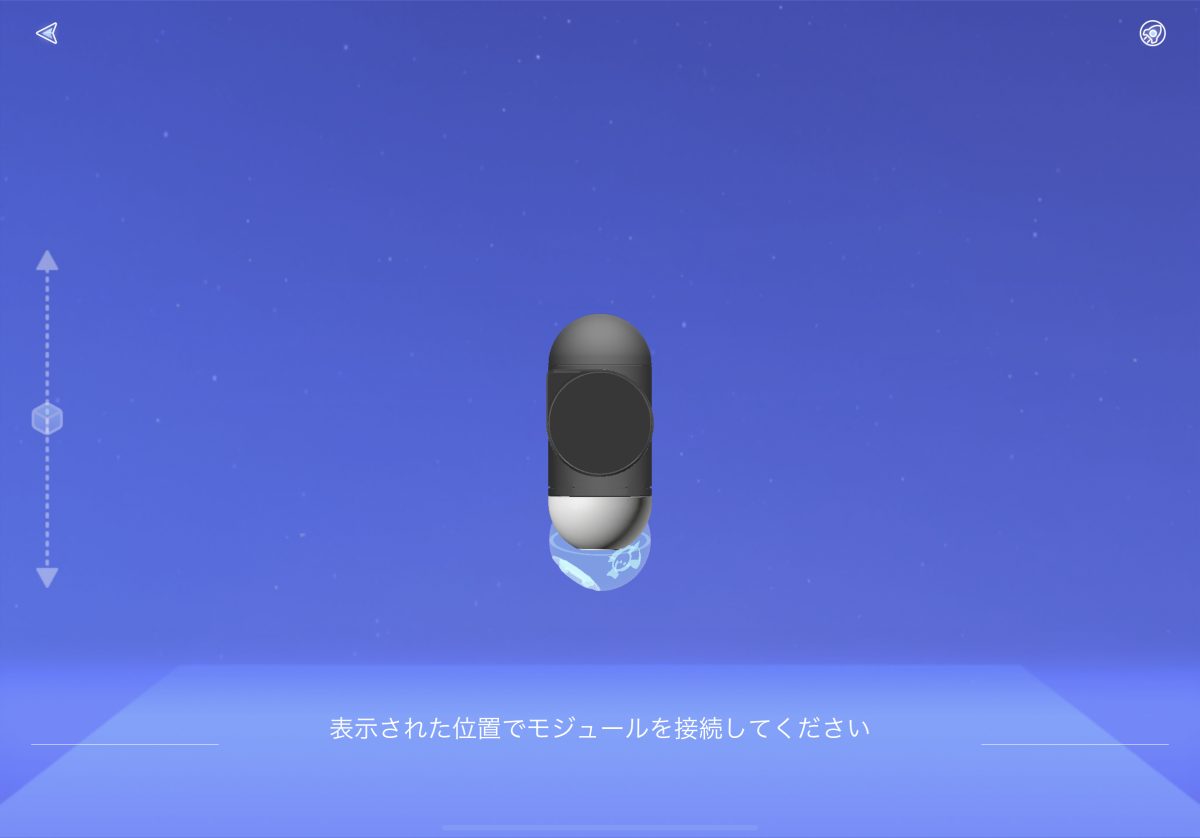
組立てるロボットを選ぶと、そのロボットの組み立て説明が始まります。といっても難しいことはなく、画面の指示に従って、順番にモジュールを接続していくだけです。
接続は、モジュールにある接合部をパチパチとはめ込むだけ。

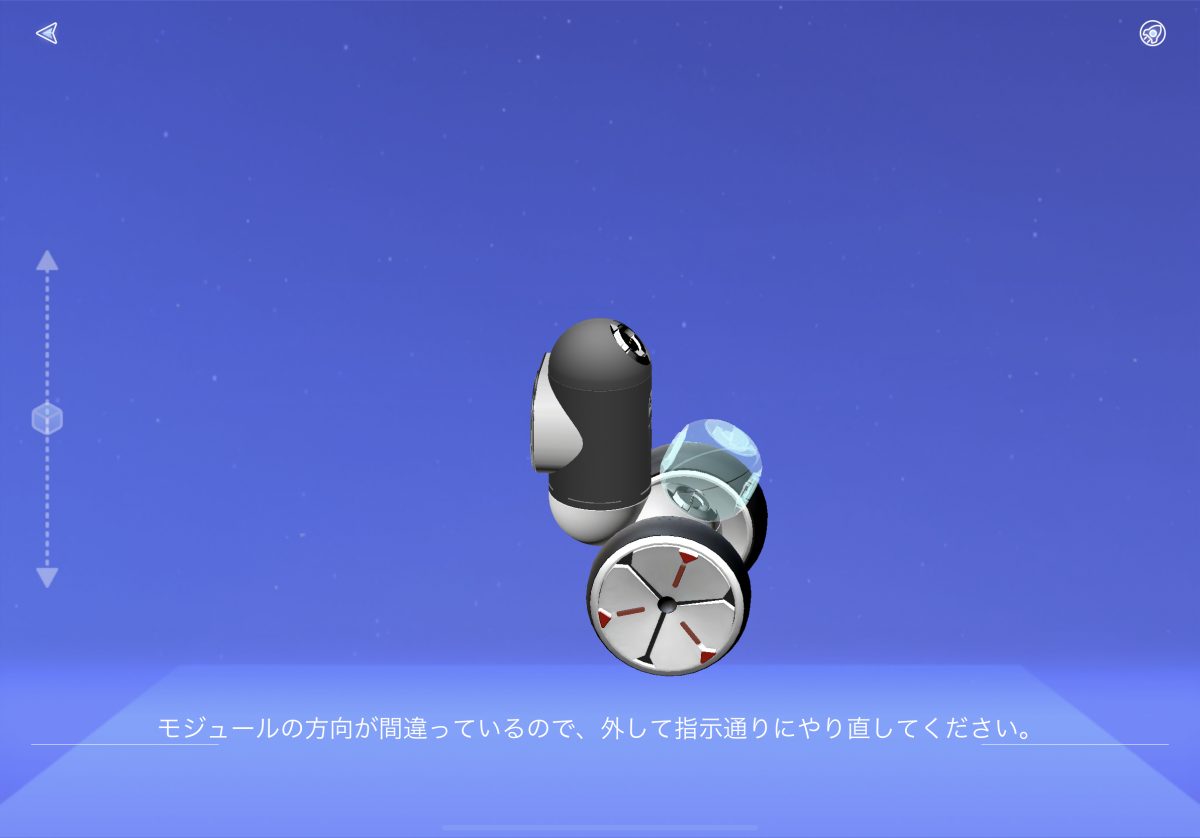
どこに何がはまったのかは、専用アプリからリアルタイムに確認可能。また、接続方法(種類や向きなど)を間違えると、ちゃんと間違えていると指摘してくれます。

組み立てが終わると、タブレット(あるいはスマートフォン)をコントローラーとしてラジコンのような操作が可能に。

あらかじめ、いくつかのモーションも登録されており、ボタン1つでそれらのモーションも起動できます。
自分で組立てる「実験室」
もう一つの楽しみ方が、自分でロボットを考え、動作なども設定できる「実験室」です。とりあえず、ロボットといえば四足歩行でしょうということで、組立ててみました。
なお、ジョイントモジュール6個と足圧センサー4個を使うので、スターターキットだけでは組立てられません。ちなみに、組立てた後に気がつきましたが、この四足ロボット、遊び場に登録されているのと同じでした……

組立て後は、動作を設定していくのですが、この方法は2つ。ボタンなどを押した際に、あらかじめ決められた動作を行うモーションと、動作条件などを含めて1からプログラムしていく方法とがあります。
モーションのほうは、動作(姿勢)を決めてたらボタンを押して記憶、次の動作(姿勢)を決めてボタンを押して……と繰り返していく方法。右足を前に出して、次は左足を前にという感じのストップモーションアニメを作るイメージです。

このあたり、Makuakeでプロジェクトを実施しているEMIトレーディングがわかりやすい動画を公開していたのでそちらを参考に。

もう1つの動作設定方法であるプログラムは、それはもう完全にプログラム。Googleが提供しているビジュアルプログラミング言語のBlocklyを利用して、「サーボモーターを何度動かす」「センサーが反応したら……」などの動作を指定可能です。
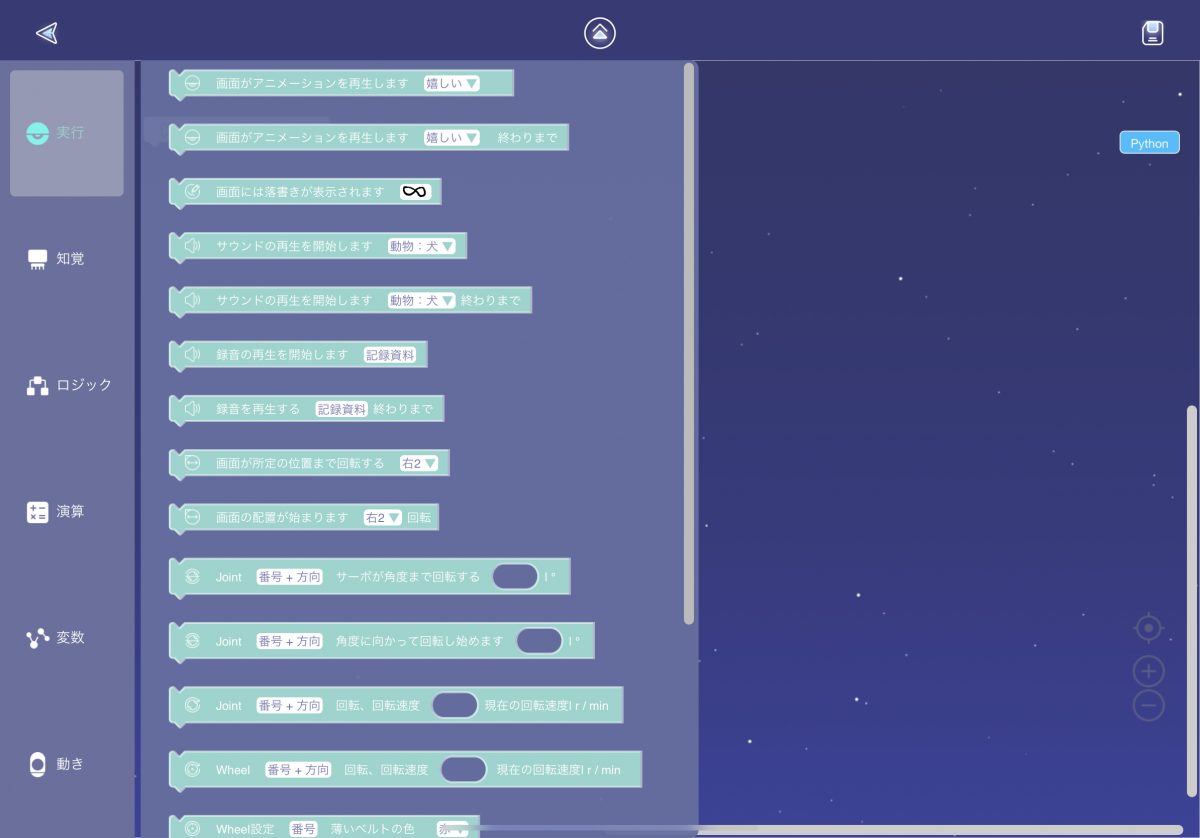
ブロックではなくPythonの表示に切り替えることもできました。
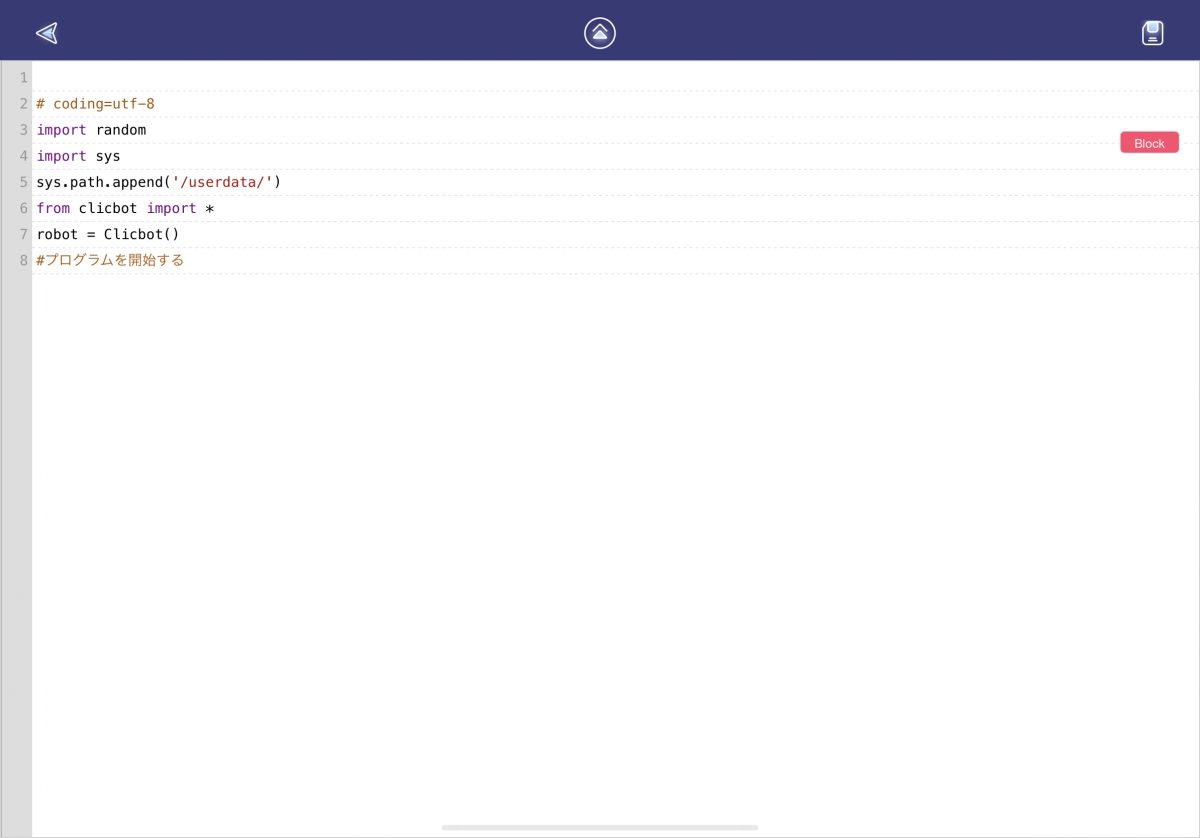
私は知識不足で、プログラムできませんでしたが、ちゃんと勉強していけばかなり複雑な動作もできそうです。「遊び場」に登録されているロボットのプログラムも公開してくれると参考になると思うので、今後に期待したいところです。
仮想人格(?)の「Bac」と「Bic」
このClicBot、ブレインユニットに仮想人格(AI?)の「Bac」と「Bic」があらかじめ設定されており、モジュールを特定の組み方をすると起動可能になります。この2つのAIはスターターキットのモジュールのみで利用可能。かつ、別途アプリを繋げなくても遊べます。


頭をなでると喜んだり、カメラを塞ぐとそれを避けようとしたりと擬似的なコミュニケーションを取って遊べます。
プログラム教育に良さそう
今回は紹介しませんでしたが、フルキットやメーカーキットにはグリッパーというマジックハンド的なモジュールも用意されており、ものを掴む動作も行えます。

作ったロボットをラジコン的に楽しむのもいいですが、やはりプログラムをして自律動作させるのがメインの活用方法でしょう。プログラムを覚えるあるいは、アルゴリズム的な思考を学ぶ上では、もってこいの教材になる気がします。
Makuakeでのプロジェクトは6月29日まで。現在の最低価格はスターターキットの4万7840円ですが、スターターキットのみでは、まちがいなく物足りなさを感じます。
最低でもスタンダードキット、できたら最上位のメーカーキットをおすすめします。とくに丸いジョイントモジュールは、数があるほど組み立ての幅が広がります。別売りで拡張パックも用意されているので、これを利用してモジュールを揃えるのもアリでしょう。

関連:
Makuake|ロボットアームやラジコンも。1000種以上の組合せロボットキット|Clicbot|マクアケ – クラウドファンディング

